Jiawei (Janna) LinI am a first-year Ph.D. student in Computer Science and Engineering at University of California, San Diego, where I work on safety and reliability in autonomous systems. I am co-advised by Prof. Sean Gao and Prof. Sylvia Herbert. Prior to joining UCSD, I graduated with a Bachelor of Science in Computer Science with Honors and Minor in Robotics in the College of Engineering at Cornell University. During my undergraduate studies, I've explored a wide range of topics in autonomous systems control. I was fortunate to work with Prof. Sarah Dean on model-based control for high-altitude balloons, Prof. Hadas Kress-Gazit on continuous execution of high-level collaborative tasks for heterogeneous robot teams, and Prof. Tapomayukh Bhattacharjee on whole-arm physical human-robot interaction (CoRL 2025). jal214 at ucsd dot edu / GitHub / Google Scholar / LinkedIn |

|
News |
| 01/2026: | Our paper High-Altitude Balloon Station-Keeping with First Order Model Predictive Control has been accepted by ICRA 2026. |
| 09/2025: | I started as a CS PhD student at UCSD. |
| 08/2025: | Our paper PrioriTouch: Adapting to User Contact Preferences for Whole-Arm Physical Human-Robot Interaction has been accepted by CoRL 2025. |
| 05/2025: | I graduated from Cornell with a B.S. in Computer Science with Honors and a minor in Robotics |
ResearchI'm interested in the safety and reliability in autonomous systems with learning-based or optimization-based methods. |
|
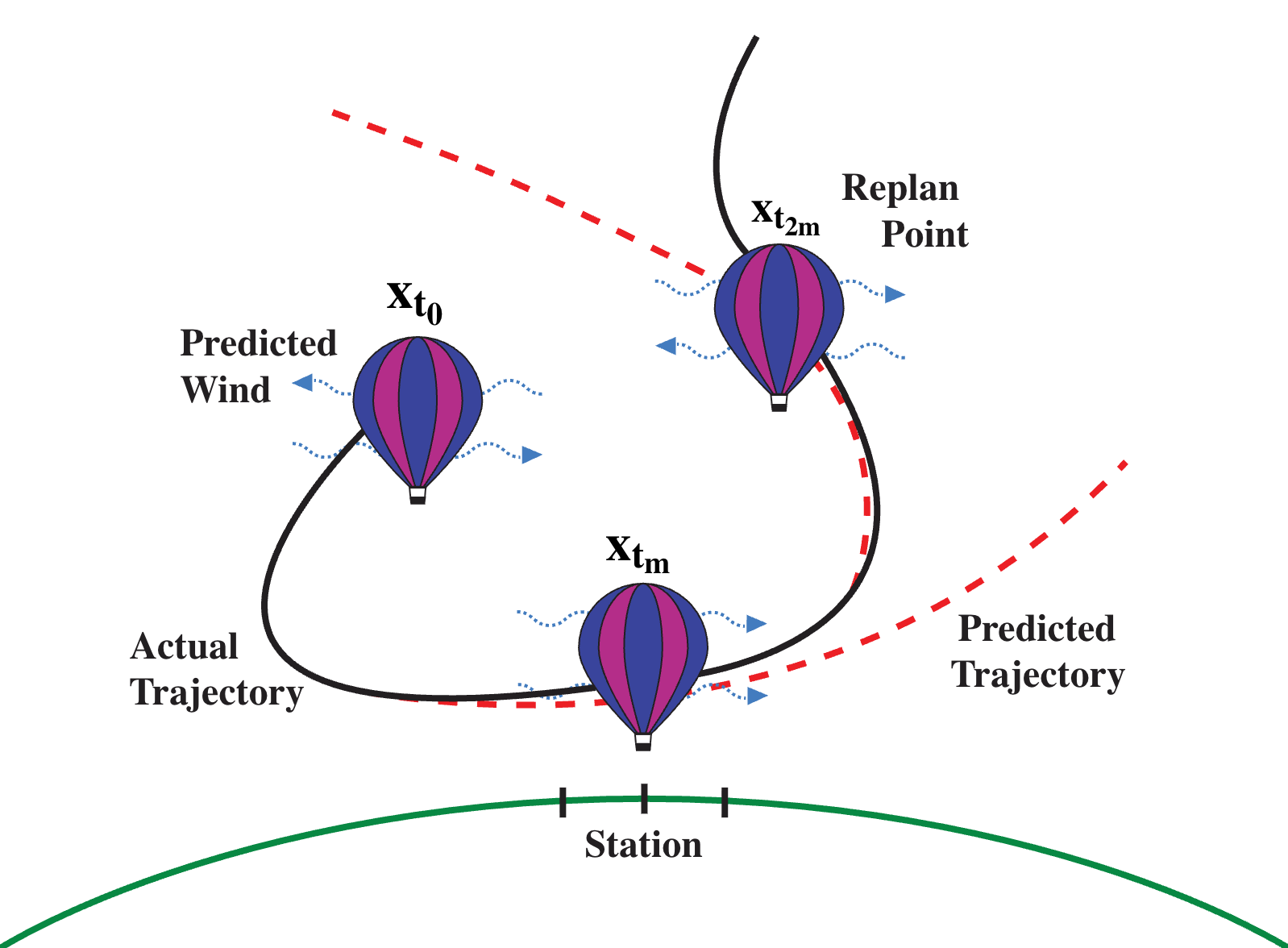
High-Altitude Balloon Station-Keeping with First Order Model Predictive ControlIEEE International Conference on Robotics and Automation (ICRA), 2026 arxiv / We revisit the assumption about the efficacy of model-based control for station-keeping by developing First-Order Model Predictive Control (FOMPC). By implementing the wind and balloon dynamics as differentiable functions in JAX, we enable gradient-based trajectory optimization for online planning. FOMPC outperforms a state-of-the-art RL policy, achieving a 24% improvement in time-within-radius (TWR) without requiring offline training, though at the cost of greater online computation per control step. |
|
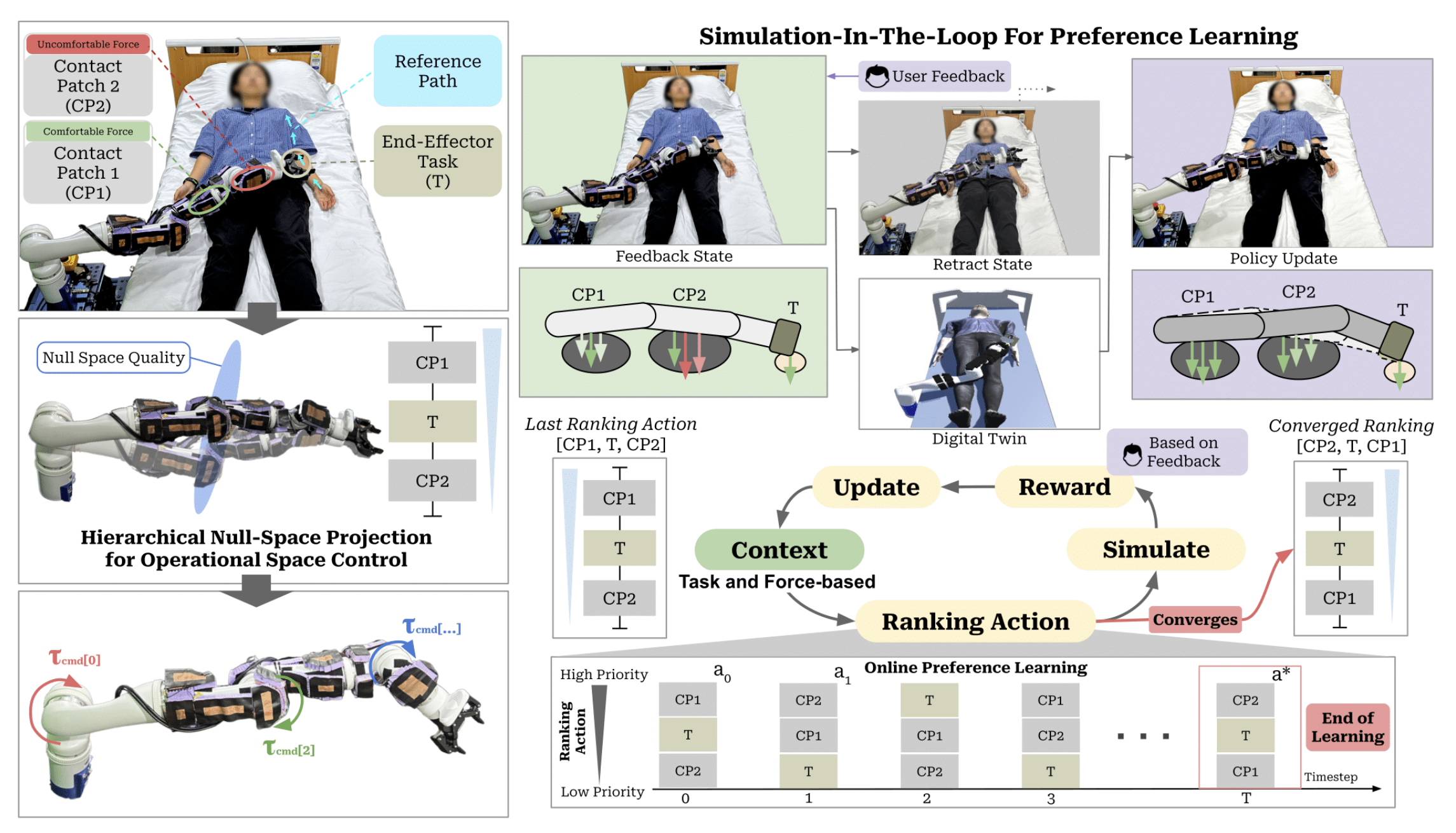
PrioriTouch: Adapting to User Contact Preferences for Whole-Arm Physical Human-Robot Interaction9th Annual Conference on Robot Learning (CoRL), 2025 website / We introduce PrioriTouch, a framework integrating a novel contextual bandit algorithm with hierarchical operational space control to learn user contact preferences and translate them into low-level pose and force control policies. |

|
Continuous Execution of High-Level Collaborative Tasks for Heterogeneous Robot TeamsarXiv, 2024 arxiv / We propose a control synthesis framework for a heterogeneous multi-robot system to satisfy collaborative tasks, where actions may take varying duration of time to complete. |
Other Projects |
|
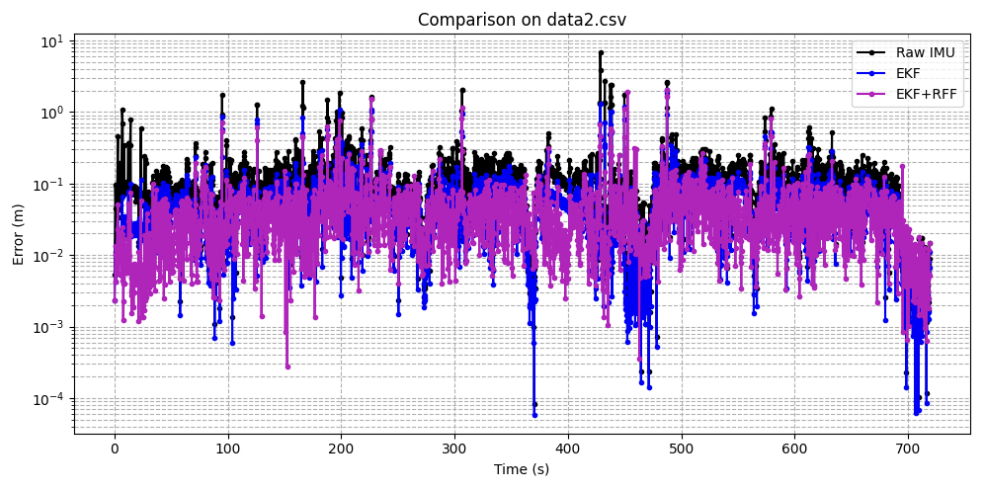
Car Dynamics Correction with Random Fourier Ridge Regression and Fast Optimal Control via DLRA Scheme of Hamilton-Jacobi-Bellman Equation: a Comparative StudyCornell CS6241: Numerical Methods for Data Science 2025 Spring Using the EU long-term dataset, we develop and compare three approaches: raw INS integration, an Extended Kalman Filter with Random Fourier Features (EKF-RFF) for state estimation, and a tensor- train-based Hamilton-Jacobi-Bellman (HJB) solver with Dynamical Low-Rank Approximation (DLRA) for optimal control synthesis. |

|
Robot-assisted Dressing for Closed Geometry ClothingCornell CS6751: Robot Manipulation 2024 Spring We propose a grasp planning framework, created using pushing actions, that bunches up cloth in a manner similar to how humans handle cloth during dressing. |
Miscellaneous |
|
I like singing (especially cantopop), reading web novels, cooking, and watching table tennis matches. I was an architecture student in my freshman year during undergraduate studies. I was fortunate enough to leave the trace of a work I participated in this world. The bus stop we designed together has become part of a necessary part of this little village in Fuding, Fujian Province, China. I am actively picking up my "mother tongue" Cantonese. I'm also learning French. |
|
Website last updated Feb 2026 Design and source code from Jon Barron's website |